Un vehículo preparado para la conducción totalmente autónoma es aquel capaz de guiarse por sí mismo, sin intervención humana y, si fuera necesario, por vías que no han sido diseñadas a tal efecto, hasta un destino previamente establecido. Todos los vehículos se catalogan dentro de un nivel concreto de autonomía en función del mayor o menor grado con que pueden asistir al conductor.
Los detalles del camino hacia la automatización total de la conducción han sido planteados con mucha precisión por el organismo global Sociedad de Ingenieros de la Automoción (SAE).
El documento J3016, que se puede adquirir en la web de la SAE (enlace), es la referencia que se utiliza en la industria del automóvil en materia de conducción autónoma. En él están recogidas las definiciones de los términos clave de esta tecnología y también están detallados y ejemplificados los niveles bajo los que se puede catalogar un vehículo, numerados del 0 al 5, de nula autonomía a autonomía total.
La conducción autónoma plantea varias ventajas con respecto a la tradicional. La Organización Internacional de Constructores de Automóviles (OICA) las recoge y diferencia en varios ámbitos.
- Seguridad vial: se evitarían los errores humanos (según la Fundación española para la seguridad Vial -Fesvial-, estos son causantes entre el 90 y el 95% del total de accidentes de tráfico).
- Organización del tráfico: optimización del flujo de vehículos y ahorro de tiempo.
- Reducción de las emisiones contaminantes.
- Cambios demográficos: apoyo a conductores inseguros y mayor movilidad de las personas de edad avanzada.
- Innovación y desarrollo de un nuevo sector industrial.
- Aumento de productividad y ocio derivado del ahorro de tiempo empleado en la conducción.
Pero no todo son ventajas; este proceso también da pie a varios aspectos poco convenientes. Entre otros:
- Se abre un nuevo marco legal muy complejo en torno a los posibles accidentes provocados por un sistema de conducción automatizada.
- Se perderían puestos de trabajo en el sector del transporte.
- El coche autónomo puede tener algunas limitaciones con respecto a uno tradicional (al menos al principio); por ejemplo, al circular en condiciones climatológicas muy adversas. Esto solo sería aplicable para la circulación en modo autónomo.
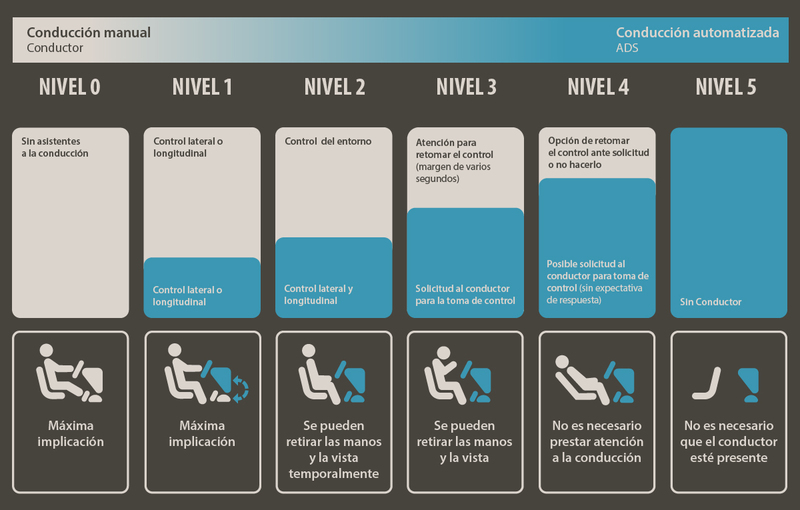
Niveles de la conducción autónoma
(En los primeros niveles el conductor es el responsable del gobierno del vehículo).
Nivel 0: sin automatización de la conducción
El conductor realiza todas las tareas que engloba la conducción. Se incluyen en este nivel los vehículos que tengan asistentes a la conducción cuyas funciones no implican el control lateral o longitudinal del vehículo. Un ejemplo es el sistema de detección de vehículos en el ángulo muerto de los retrovisores.
Nivel 1: asistencia al conductor
Los vehículos que se incluyen en este nivel tienen asistentes a la conducción que pueden controlar el movimiento lateral o longitudinal, nunca los dos a la vez. Unos dispositivos de este tipo son, por ejemplo, el programador de velocidad activo -controla el movimiento longitudinal- o un asistente de ayuda al aparcamiento de los que solo puede accionar el volante -el conductor opera los pedales-.
Nivel 2: automatización parcial de la conducción
En este nivel, los vehículos tienen asistentes a la conducción que pueden controlar el movimiento lateral y también el longitudinal. El conductor es el único responsable de la conducción porque estos asistentes tienen un ámbito de uso limitado y además el vehículo no está preparado para ejecutar una respuesta ante la detección de obstáculos imprevistos.
Un sistema de mantenimiento en el centro del carril trabajando junto a un programador de velocidad activo es un ejemplo de automatización de nivel 2. También lo es un asistente de conducción en atascos y algunos de ayuda al aparcamiento que operan el volante y los pedales.
El primer coche con un nivel 2 fue el Mercedes-Benz Clase S 2013. Los modelos de Tesla, como el Model X, también son nivel 2, al igual que otros modelos de las marcas Audi, BMW, DS, Ford, Jaguar, Hyundai, Land Rover, Lexus, Nissan, Peugeot, SEAT y Volvo, entre otras.
A partir del Nivel 3 hay un salto cualitativo grande porque el vehículo tiene un sistema de conducción automatizada que puede realizar la totalidad de las tareas que engloba la conducción.
Nivel 3: automatización condicional de la conducción
A partir de este nivel, el conductor puede decidir que el sistema de conducción automatizada tome el control sobre el vehículo y realice todas las funciones de la conducción con unas ciertas limitaciones.
En el Nivel 3, el conductor no necesita supervisar la conducción, pero sí ha de estar alerta e intervenir cuando el sistema lo requiera porque este no sepa cómo actuar ante una situación de riesgo. El sistema se desactiva de inmediato cuando el conductor lo solicita y también demanda la intervención del conductor cuando detecta algún fallo en su funcionamiento o cuando los límites de su ámbito de actuación van a ser sobrepasados —el sistema se diseña con limitaciones geográficas, o por situaciones provocadas por obras, etc—. El aviso da un margen de tiempo, de varios segundos, para que el conductor retome el control (en inglés, handover).
Nivel 4: alta automatización de la conducción
En este nivel, el sistema de conducción automatizada puede guiar el vehículo de forma sostenida en el tiempo sin la expectativa de que el conductor responda ante una demanda de intervención, salvo cuando se encuentre fuera de su ámbito de funcionamiento. El sistema está preparado para actuar ante una situación imprevista de peligro y para realizar sin ayuda el conjunto de acciones que desenlacen en la situación más segura posible (se le denomina situación de mínimo riesgo).
El sistema de conducción automatizada de los vehículos de nivel 4 también tiene, al igual que en el nivel 3, un ámbito de funcionamiento limitado. Mientras el vehículo se encuentre dentro de ese ámbito, el conductor puede elegir cuándo pone en funcionamiento el sistema y también puede solicitar la desconexión para retomar el control del vehículo, aunque en este caso, a diferencia de en el nivel 3, el sistema puede demorar su desconexión si lo considera necesario. Otra diferencia entre ambos niveles es que en el tres, el tiempo que da el coche al conductor para que retome la conducción es de segundos y en el cuatro puede ser de minutos. Además, en el caso de que el conductor no lo haga, el vehículo será capaz de detenerse en una zona segura (no se espera que el conductor retome el control).
Nivel 5: automatización total de la conducción
En el nivel 5, el sistema de conducción automatizada (ADS; automated driving system) tiene un ámbito de funcionamiento que comprende todas las condiciones y lugares por los que podría circular un conductor humano. Esto quiere decir que para el ADS no se diseñan limitaciones geográficas o climatológicas y, por tanto, que el vehículo puede prescindir de un conductor y de elementos como el volante o los pedales.
Aunque quizás parezca razonable que la industria vaya escalando de un nivel a otro hasta lograr la autonomía total, la complejidad técnica y la variabilidad estratégica que entraña el desafío del coche autónomo han propiciado un proceso de diversificación empresarial profunda que da respuesta a todas las nuevas oportunidades de negocio.
Algunas empresas trabajan para satisfacer la demanda de movilidad compartida, cada vez mayor en ámbitos urbanos. En este sentido, uno de los objetivos principales de empresas como Waymo (la división de vehículos autónomos de Google) y Uber, por ejemplo, es desarrollar vehículos de nivel 5 geofenced (o lo que es lo mismo, con un ámbito geográfico de actuación limitado, pero sin necesidad de conductor) que puedan operar como taxis urbanos autónomos. A finales de 2018, Waymo puso en marcha un proyecto piloto mediante el que ofrece este servicio en una zona de los suburbios de la ciudad de Phoenix (Arizona, EE. UU.).
Algunas compañías están centrando sus esfuerzos en delimitar otros ámbitos de funcionamiento en modo autónomo para coches y camiones, como determinadas rutas por autopista. Otras, como por ejemplo Tesla o Audi, también trabajan para llevar las soluciones tecnológicas de la conducción autónoma al vehículo particular en un sentido más general, con el objetivo de evolucionar hacia el nivel 5, aunque no se espera que este sea una realidad a corto o medio plazo.
Tecnología necesaria para la conducción autónoma
Los sistemas de conducción automatizada dependen de subsistemas de sensores que funcionan en base a distintos principios tecnológicos. A continuación están listados la mayoría de ellos.
Sensores ultrasónicos
Son efectivos para detectar elementos que se encuentran a poca distancia del vehículo. Funcionan emitiendo ondas sonoras no audibles y calculando el tiempo que tardan en regresar al punto de emisión. Son frecuentes desde hace varios años en los automóviles por su bajo coste y suelen emplearse en los sistemas de ayuda al aparcamiento y en las alarmas.
Posicionamiento y navegación por satélite
Su uso también está extendido desde hace varios años. Estos sistemas pueden localizar un vehículo en un punto del planeta mediante la técnica de trilateración, utilizando una red de satélites. Su principal inconveniente es que tiene un margen de error de unos (pocos) metros, aunque mediante otras técnicas se consigue una localización más precisa, necesaria para los altos niveles de autonomía (hay más información en el siguiente apartado). Hay varios sistemas de posicionamiento y navegación por satélite en funcionamiento actualmente, todos ya compatibles entre ellos:
- GPS (Global Positioning System). Fue desarrollado por el Departamento de Defensa de EE.UU. Utiliza una red de 24 satélites.
- GLONASS. Fue desarollado por la URSS y está administrado por la Federación Rusa. Utiliza una red de 31 satélites.
- Galileo. Desarrollado por la Unión Europea en conjunto con la Agencia Espacial Europea. Cuando esté a pleno funcionamiento utilizará 30 satélites (previsto para el año 2020). Actualmente emplea 26.
Sistemas de navegación inercial
Intervienen sensores de movimiento y sensores giroscópicos que calculan mediante estima y sin referencias externas la posición de un vehículo, la dirección de su trayectoria y su velocidad en todo momento. Suelen utilizarse en conjunto con los sistemas de posicionamiento para aumentar su precisión, aunque no dan una precisión suficiente para los niveles 4 y 5 de la conducción autónoma.
Sensores infrarrojos
La luz infrarroja del espectro es invisible al ojo humano y se emplea para detectar y realizar un seguimiento de objetos en condiciones de baja cantidad de luz. Hay más información sobre los sistemas de visión nocturna en esta entrada del glosario. Desde principios de la década de 2010 comienzan a ser relativamente frecuentes como elementos de equipamiento opcional en vehículos de gama alta. El primer vehículo de producción que se ofreció con un sistema de visión nocturna fue el Cadillac DeVille del año 2000.
Sistema de cámaras
Están generalizados en automoción. Mientras que la tecnología relativa a la grabación está muy desarrollada desde el punto de vista de la calidad y el bajo precio de las cámaras, el mayor desafío de estos sistemas radica en el desarrollo del software que realice una interpretación correcta de las imágenes y una posterior elaboración de respuestas acordes. La efectividad se reduce en condiciones de baja cantidad de luz y de climatología adversa.
Radar
Utiliza ondas electromagnéticas para detectar y realizar un seguimiento de objetos. Puede funcionar con mucha precisión en distancias de hasta unos 300 metros y es muy efectivo principalmente para determinar la presencia de un cuerpo, aunque también para determinar la dirección en la que viaja y a qué velocidad lo hace. Su efectividad apenas decrece en condiciones de baja visibilidad o climatología adversa y, además, su coste es relativamente bajo. Su uso ya está generalizado en la industria del automóvil en asistentes a la conducción como el control de velocidad activo, la detección de vehículos en el ángulo muerto, el frenado automático de emergencia o los sistemas de protección previa a la colisión.
Lídar: acrónimo del inglés LIDAR (Laser imaging detection and ranging)
Este sistema permite determinar la distancia desde un emisor láser a un objeto utilizando haces láser pulsados. Los sistemas lídar modernos permiten recoger información complementaria al radar. La distancia de alcance de los haces láser es mucho mayor que la de los ultrasonidos y el grado de definición que se consigue sobre la información del entorno es mucho más alto.
La información recogida con un sistema lídar permite generar mapas muy detallados, en tres dimensiones, formados por nubes de puntos (también se pueden generar mapas detallados utilizando cámaras o radares). Como se explica más adelante en el texto, estos mapas tienen aplicaciones cruciales para lograr la producción de vehículos de los niveles 4 y 5 de autonomía descritos más arriba en el texto.
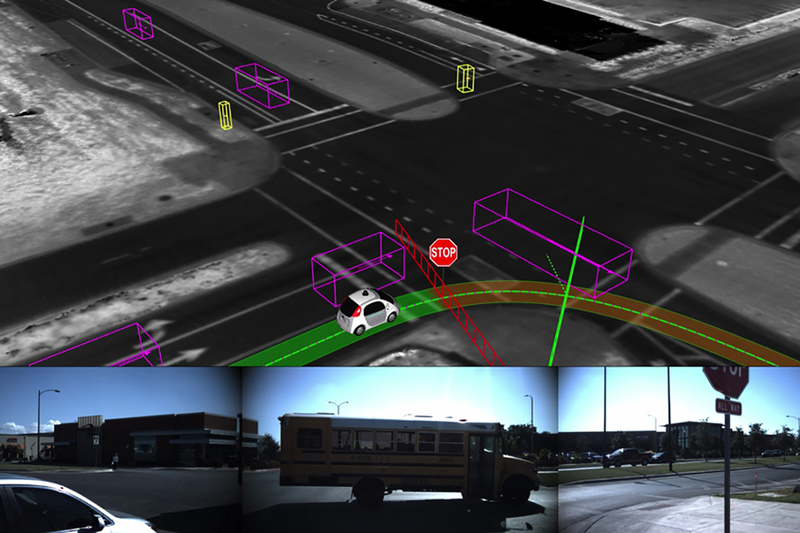
Esquema de la percepción del entorno. Waymo.
Cartografía, localización e interpretación de datos del entorno
La cartografía, la localización y la percepción son apartados íntimamente relacionados en la conducción autónoma. La cartografía no sólo sirve para guiar al vehículo hasta el destino, sino que también se considera el método más preciso para determinar su localización exacta.
Hay varias aproximaciones al problema conjunto que plantea situar al vehículo con precisión en un punto, guiarlo y además localizar e interpretar la información del resto de elementos móviles del entorno.
Por ejemplo, Tesla utiliza ocho cámaras, un radar frontal y doce sensores ultrasónicos en el sistema Autopilot que comercializa actualmente. La localización del vehículo se determina mediante el sistema de posicionamiento y navegación por satélite, apoyado por las cámaras y los sistemas de navegación inercial. Hasta ahora, la empresa NVIDIA ha fabricado los procesadores que habilitan la interpretación de los datos que recogen los sensores (las cámaras, el radar y los sensores ultrasónicos).
En otros proyectos de conducción autónoma, la localización más precisa del vehículo se consigue comparando los datos que van registrando los sensores instalados en el vehículo mientras este circula, con la cartografía de alta definición que lleva incorporada y que ha sido desarrollada previamente utilizando combinaciones de lídar, cámaras y radar.
Hay varias empresas que centran su actividad en la creación de cartografías de alta definición. Algunas de las más relevantes son TomTom, HERE y Mobileye. No todas emplean la misma estrategia tecnológica para desarrollar las cartografías; por ejemplo TomTom da más relevancia al radar y Mobileye a las cámaras. La cartografía más sencilla se obtiene recopilando datos sobre ciertas características de la carretera (como marcas de los carriles, señales de tráfico, puentes y otros objetos cercanos) que hacen viable la navegación por sí solos.
Un ejemplo es Cadillac, que en Estados Unidos ya comercializa para algunos de sus modelos el sistema Super Cruise que, a diferencia del Autopilot de Tesla, permite al conductor retirar las manos del volante (la legislación de ese país contempla esta posibilidad) en condiciones determinadas mientras circula por tramos concretos de autopistas que han sido previamente cartografiadas con sensores lídar. Para ello, el vehículo emplea los mapas generados con anterioridad (no dispone de sus propios sensores lídar), además del sistema para posicionamiento y navegación por satélite, el sistema de cámaras y el programador de velocidad adaptativo. Los vehículos con Super Cruise no se corresponden con el nivel 3 de autonomía. Cadillac especifica que este producto no tiene muchas capacidades esenciales para lograrlo; entre ellas, evitar la colisión con obstáculos inesperados, cambiar de carril o circular por zonas de obras. El conductor siempre ha de prestar atención al entorno y estar preparado para retomar el control.
En sus taxis de nivel 5 geofenced (se recuerda al lector que están diseñados para funcionar sin conductor), Waymo utiliza una combinación de tres tipos de lídar —optimizados para distintos alcances—, radar y cámaras. Entre los sensores suplementarios que se pueden ver en el diagrama de la imagen inferior, están algunos que se han mencionado (como los de posicionamiento y navegación por satélite) y otros como un sistema de detección de audio que puede reconocer las sirenas de los vehículos de emergencias, por ejemplo. Para la percepción del entorno, el software que llevan los vehículos se ha ido perfeccionando, de forma exhaustiva y durante años, con distintas fases de pruebas en simuladores, en circuitos cerrados y, finalmente, en el tráfico abierto.
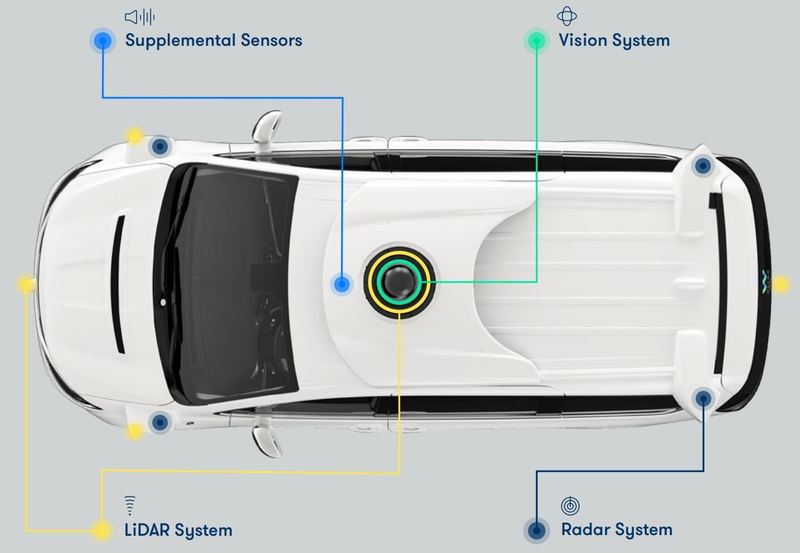
Diagrama de sensores de Waymo
Sistemas de comunicación vehicular
Es un tipo de comunicación en la que vehículos y estaciones al borde de la carretera son nodos comunicativos que tienen la capacidad de intercambiar información, principalmente relativa a la seguridad y las condiciones generales de la circulación, con el fin principal de evitar accidentes y congestiones de tráfico. No son estrictamente necesarios; por ejemplo, Waymo no los utiliza.
Este tipo de comunicación puede estar sustentada por dos tipos de tecnología. Por una parte, 5G; por otra, DSRC (comunicación dedicada de corto alcance), que opera de forma inalámbrica a 5,9 Ghz, tiene un alcance de 1000 metros y permite la comunicación bidireccional.
Se distinguen la comunicación entre vehículos V2V (Vehicle to vehicle) y la que se produce entre vehículos y las estaciones al borde de la carretera, V2I (Vehicle to infraestructure). Algunos ejemplos de las aplicaciones que pueden tener estos sistemas son avisos de condiciones cambiantes en la carretera como vehículos detenidos más adelante, curvas peligrosas o presencia de firme deslizante en tramos concretos.
Redundancia de sistemas
Los sistemas de conducción automatizados han de estar diseñados para elaborar una respuesta que les permita fallar sin poner en peligro a los ocupantes, las personas del entorno o al propio vehículo (especialmente, como se ha visto más arriba en el texto, en los vehículos de los niveles 3, 4 y 5, en los que la persona no tiene por qué retomar el control del vehículo o ni siquiera tiene que estar presente). Como es imposible asegurar que todos los sistemas vayan a funcionar sin fallos, la conducción autónoma sin accidentes pasa por desarrollar varios niveles de redundancia en todos los sistemas de control críticos para la seguridad, como los de dirección y de frenado (en estos dos casos, la redundancia se precisa desde el nivel 3). Además, son necesarias redundancias en otros muchos apartados, como en las fuentes de energía que alimentan cada elemento y en los sistemas de posicionamiento, de planificación y de sensores, entre otros.
En un sistema de frenos, por ejemplo, se puede conseguir la redundancia sustituyendo la habitual bomba de vacío por una bomba electromecánica. Se mantiene la habitual centralita del control de estabilidad. Lo que se consigue con esto es que tanto la centralita del control de estabilidad como la bomba electromecánica puedan activar los frenos de manera independiente de la actuación del conductor sobre el pedal. Aunque falle el sistema de ABS, ambos actuadores tienen la capacidad de modular la presión de frenado para evitar el bloqueo de las ruedas y que así el vehículo pueda mantener la capacidad de gobierno sobre la dirección.